This week we finished the automatic obstacle avoidance function. In addition, we tried to merge auto-avoidance with road tracking, but we did not complete the merge due to lack of time. Fortunately, both of our functions are working properly separately.
Collision Avoidance
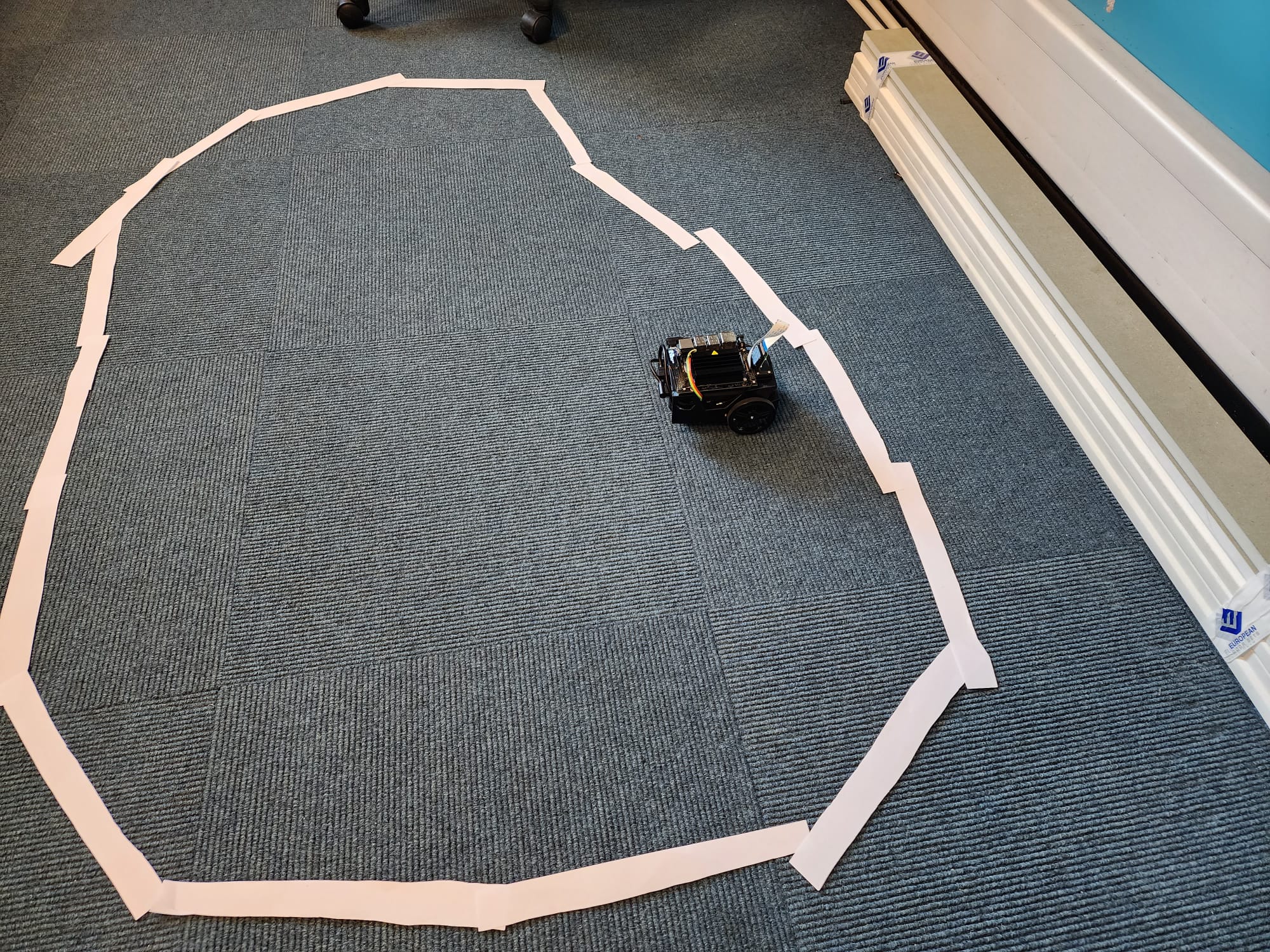
Datasets
As last time, we first built an area with paper strips as "barriers". A dataset of 200 images was created in this area.
Training
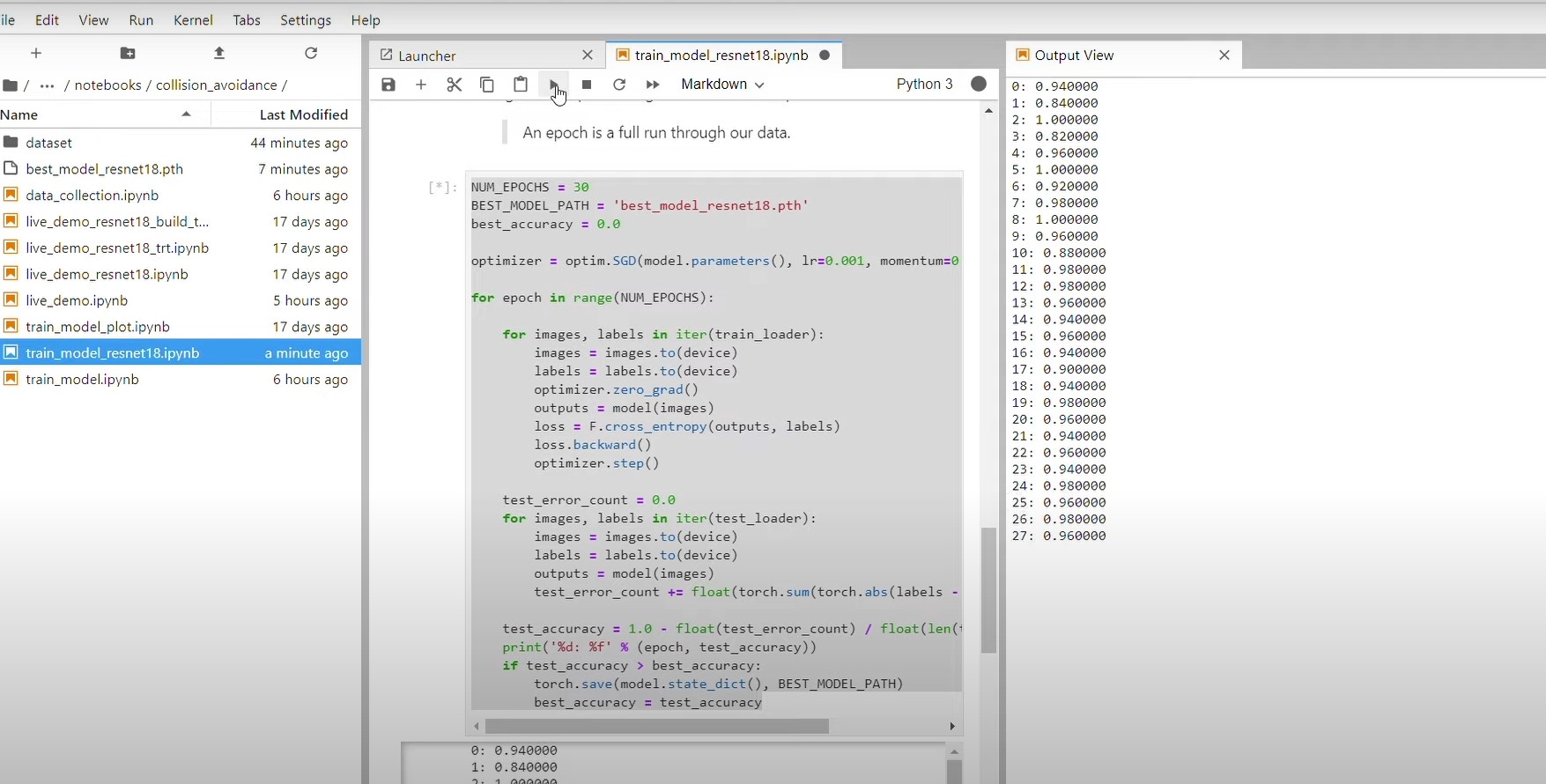
Again, we chose the ResNet-18 model and imported the dataset for 30 rounds of training. At this point, note that the Jetbot's heat sink will be very hot due to passive cooling.
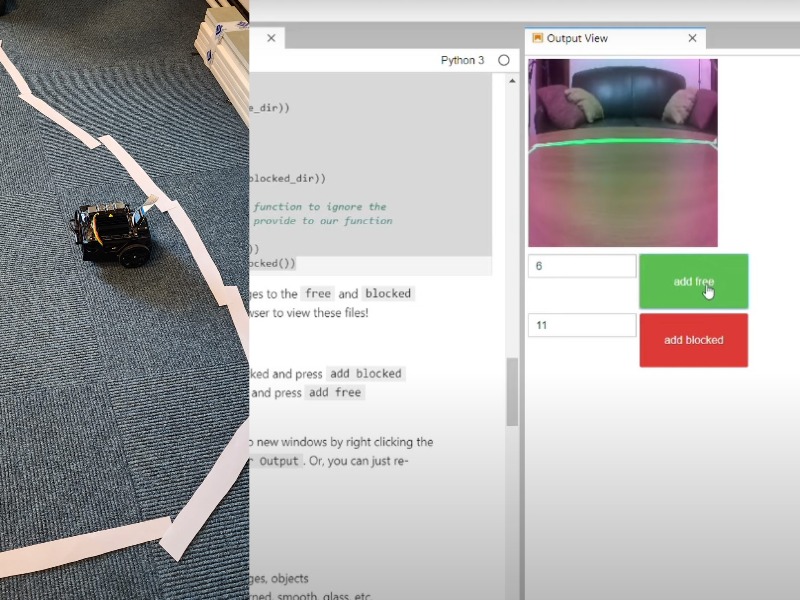
Testing
Slightly different from the road tracking test, this time there is no need to adjust the motor-related parameters. However, parameters such as steering sensitivity in the model can still be adjusted manually. Fortunately we implemented this feature.
Consolidation
We tried to merge the models of road tracking and automatic obstacle avoidance, but lack of time prevented us from achieving this work. There are many ways to do this, but they all take some time. For example, merging two models and adding logic code to the main program to call the different models, but it is a pity that this was not done.
__END__