This week we got the components for the Jetbot and worked together to complete the assembly of the Jetbot.
Hardware Setup
Motor
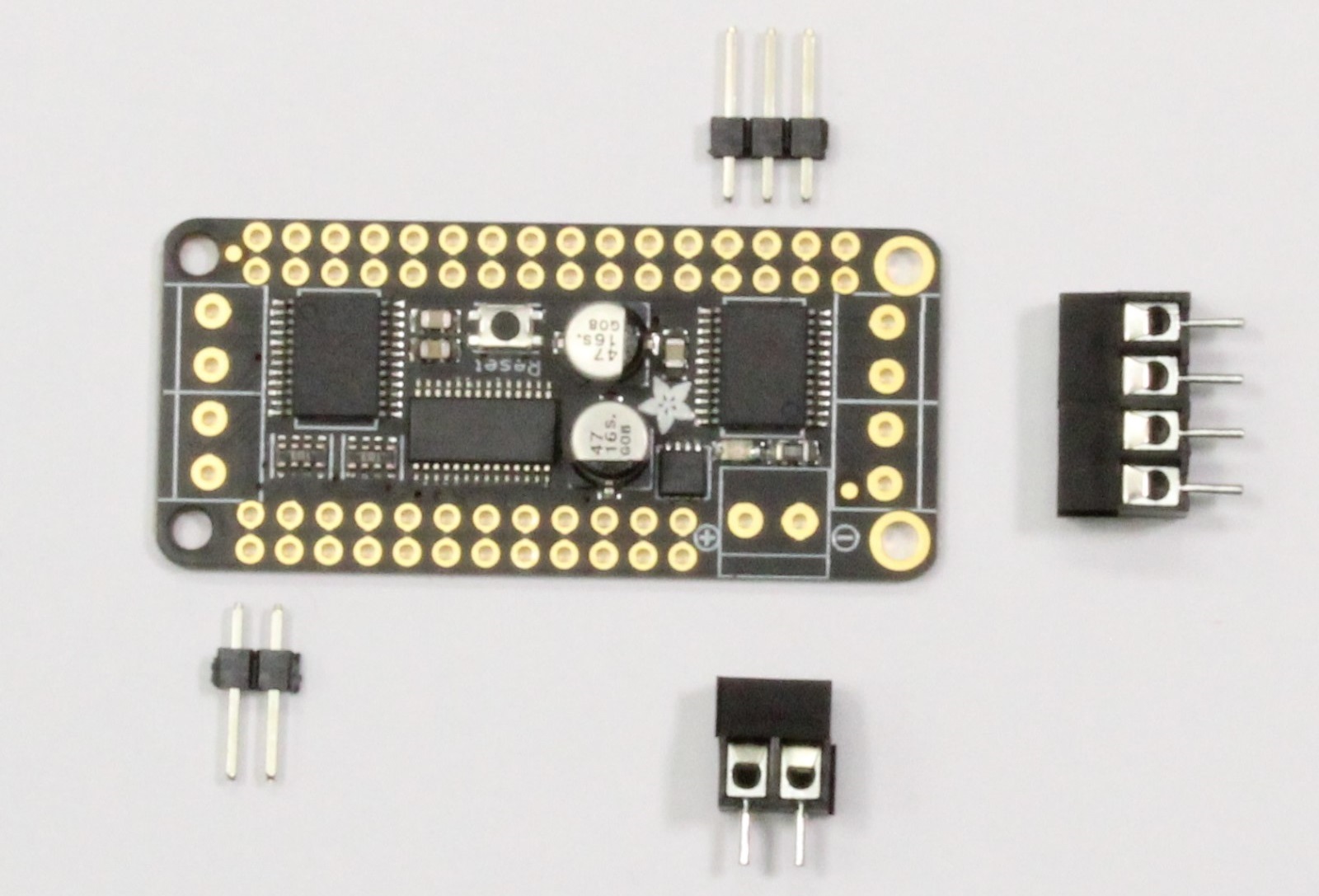
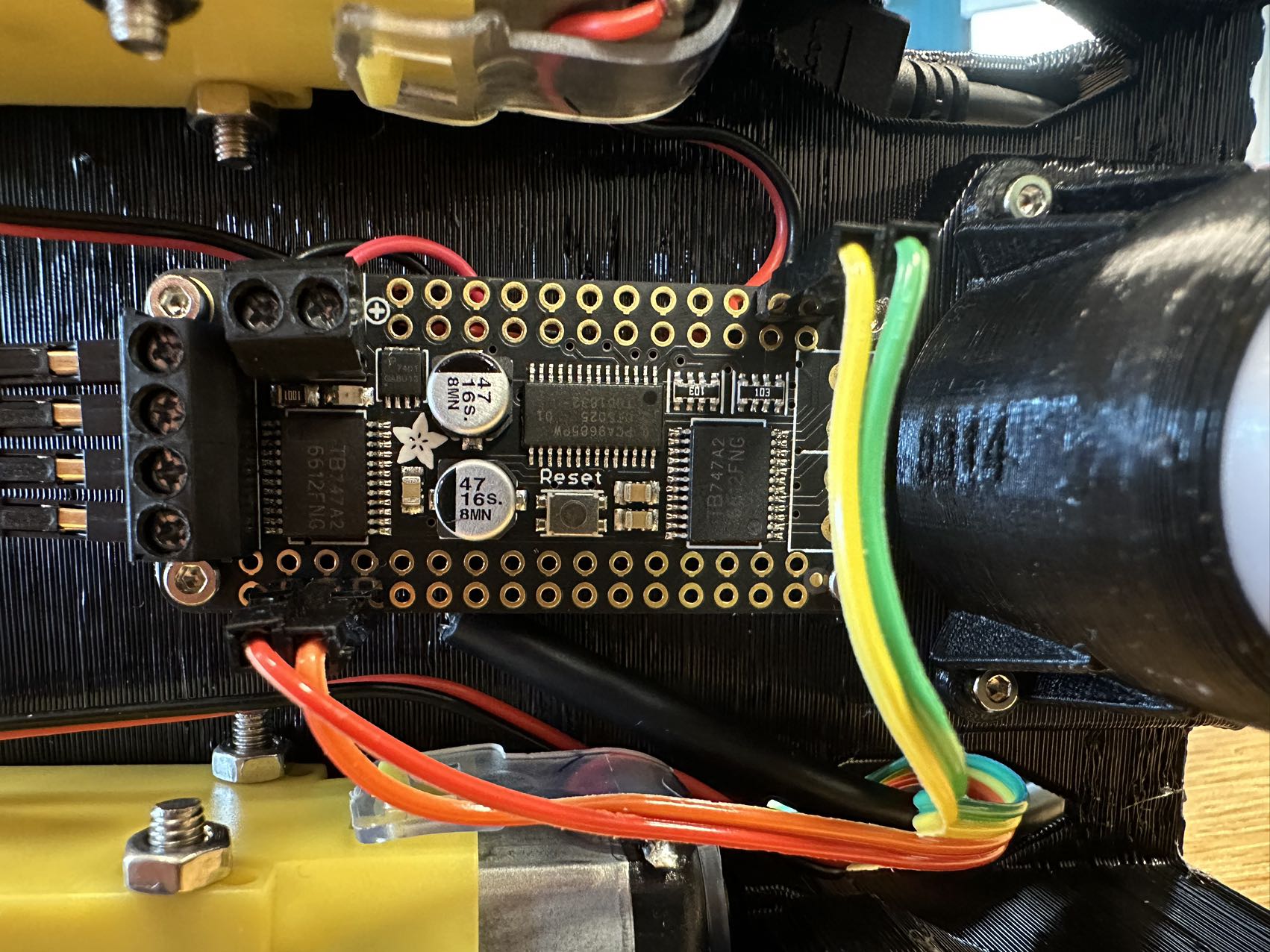
The Jetbot's motion module consists of two motors as well as a motor driver. Plug a data cable into the motherboard of the Jetson nano. And assemble the two wheels to the motors.
WiFi
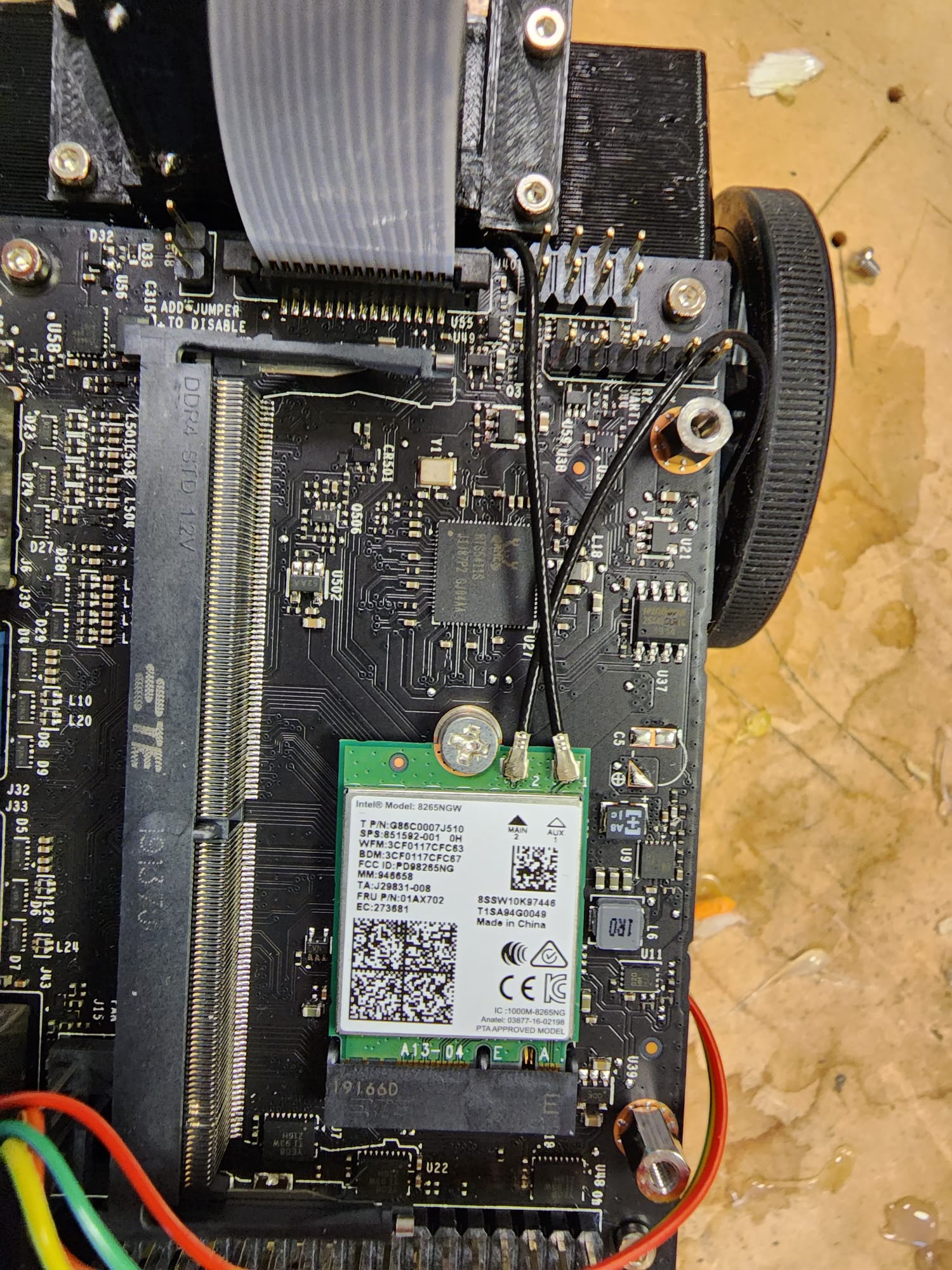
The WiFi module consists of a wireless network adapter that plugs directly into the Jetson nano's motherboard.
Display
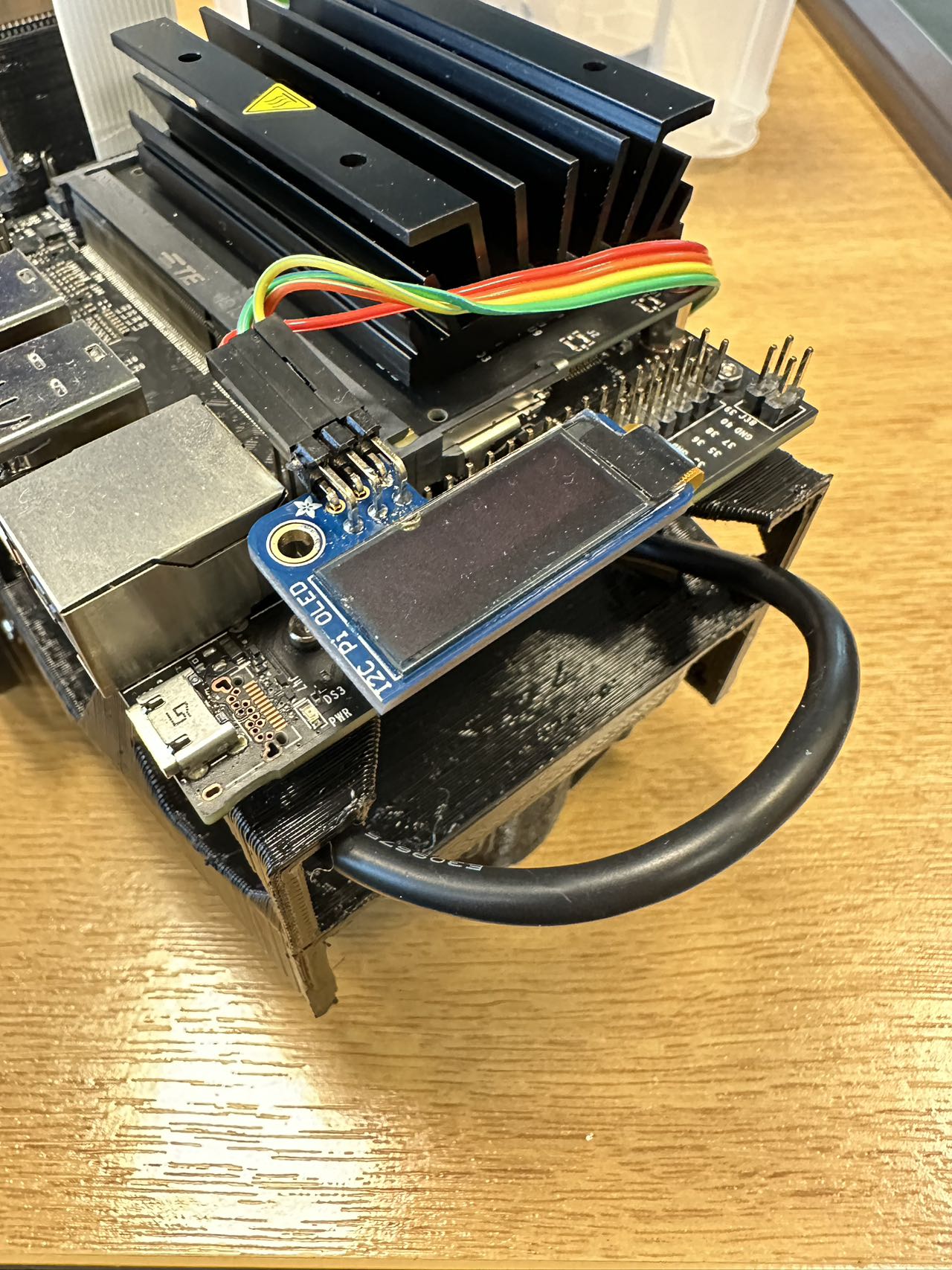
Attaching a PiOLED screen to the Jetson nano motherboard requires soldering to be done here.
Camera
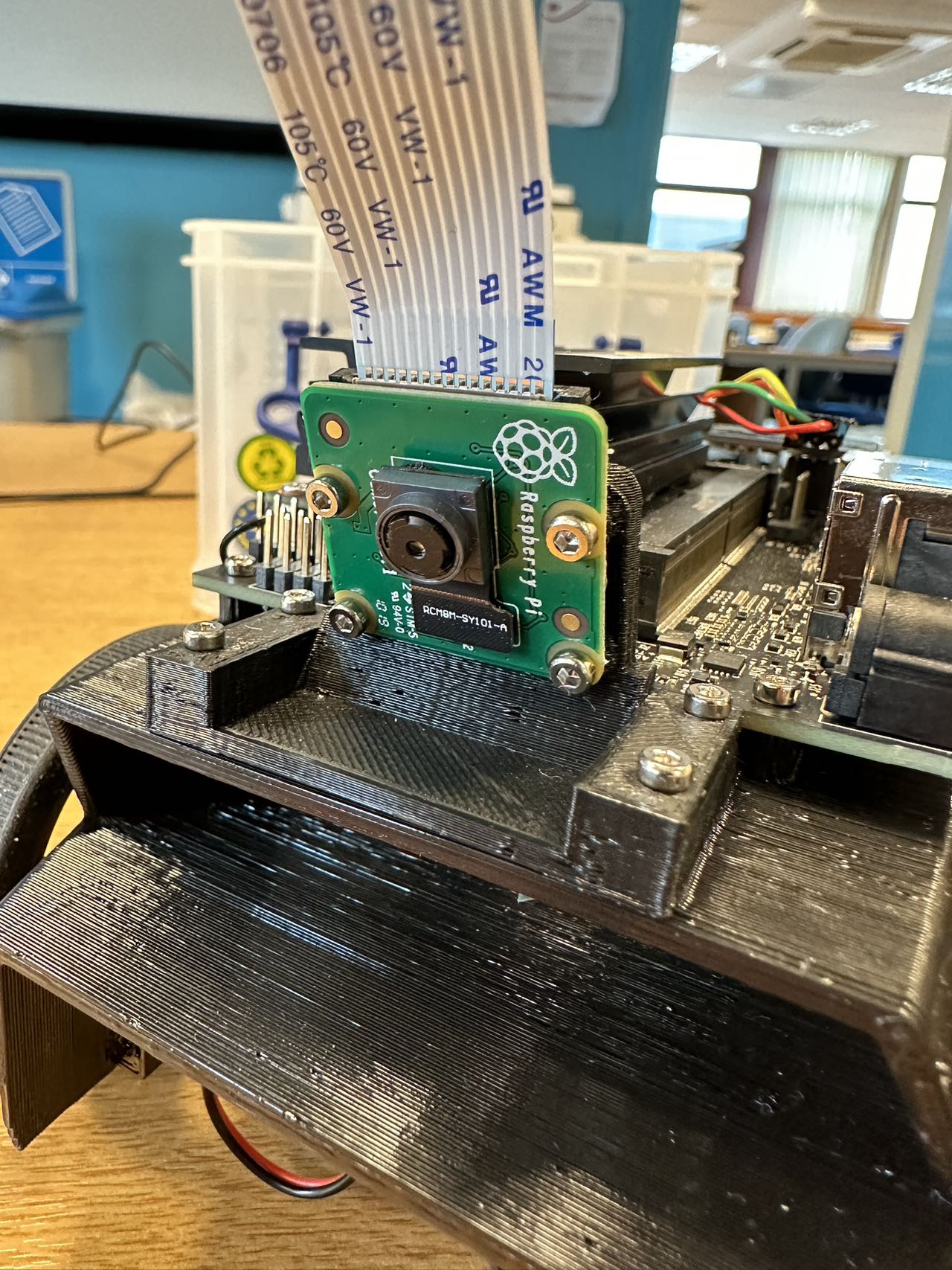
Connecting a Raspberry Pi csi camera to a Jetson nano motherboard.
Battery

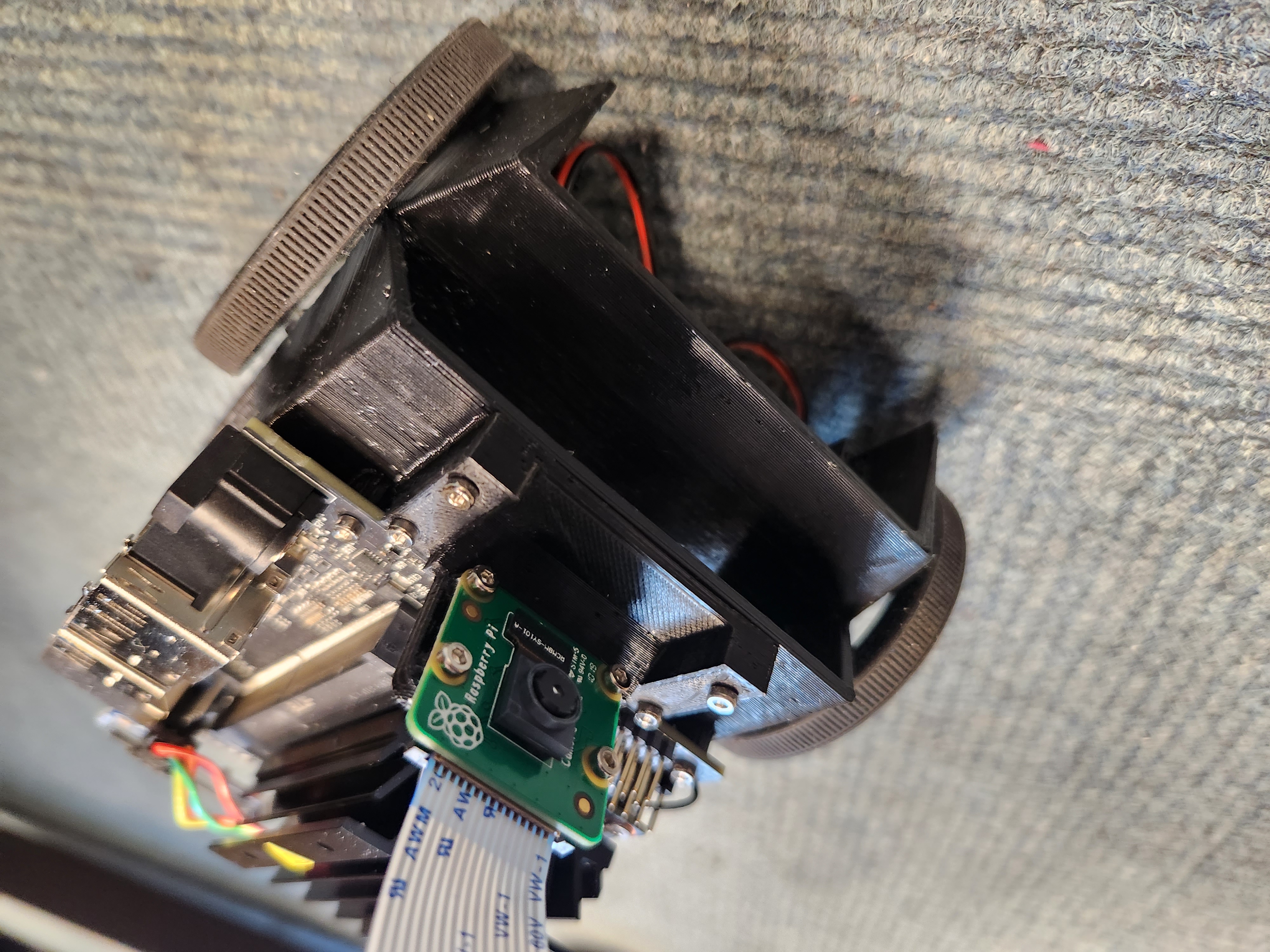
Put the rechargeable battery into the body. And connect the two outputs to the motor and the motherboard respectively, which are used to power the motherboard and the motor.
Assembly completed
__END__